位置对于 self-attention 来说,是无法分辩的信息,因为 self-attention 的运算是无向的。因此需要把 tokens 的位置信息告诉模型
在 transformer 的 encoder 和 decoder 的输入层中,使用了 Positional Encoding,使得最终的输入满足:input=input_embedding+positional_encoding
一种自然而然的想法是,给第一个 token 标记1,给第二个 token 标记2,以此类推。
这种方法产生了以下几个主要问题:
- 模型可能遇见比训练时所用的序列更长的序列。不利于模型的泛化
- 模型的位置表示是无界的。随着序列长度的增加,位置值会越来越大
比如有 3 个 token,那么位置信息就表示成 [0, 0.5, 1]
但这样产生的问题是,当序列长度不同时,token 间的相对距离是不一样的。例如在序列长度为 3 时,token 间的相对距离为 0.5;在序列长度为 4 时,token 间的相对距离就变为 0.33
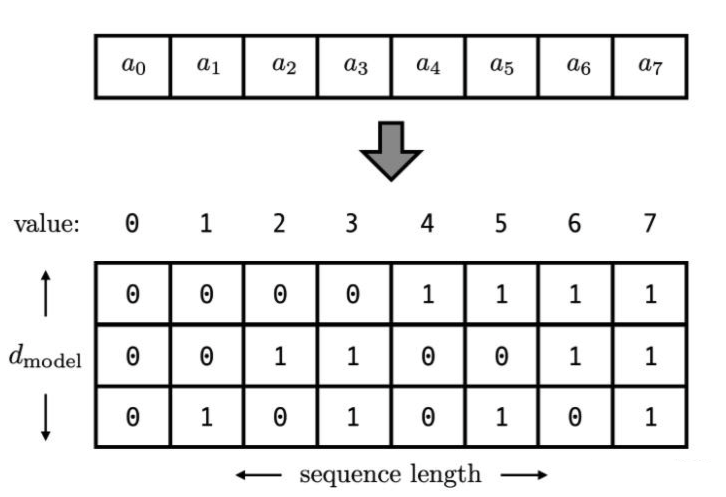
考虑到位置信息作用在 input embedding 上,因此比起用单一的值,更好的方案是用一个和 input embedding 维度一样的向量来表示位置。这时我们就很容易想到二进制编码。
如下图,假设d_model = 3,那么我们的位置向量可以表示成:
但是这种编码方式也存在问题:这样编码出来的位置向量,处在一个离散的空间中,不同位置间的变化是不连续的
我们需要一个有界又连续的函数,最简单的,正弦函数 sin 就可以满足这一点。我们可以考虑把位置向量当中的每一个元素都用一个 sin 函数来表示,则第 t 个 token 的位置向量可以表示为:
PEt=[sin(201t),sin(211t),...sin(2dmodel−11t)],其中 wi=10000i/(dmodel−1)1
问题:由于 sin 是周期函数,如果函数的频率偏大,引起波长偏短,则不同 t 下的位置向量可能出现重合的情况。
目前为止,我们的位置向量实现了如下功能:
- 每个 token 的向量唯一(每个sin函数的频率足够小)
- 位置向量的值是有界的,且位于连续空间中。模型在处理位置向量时更容易泛化,即更好处理长度和训练数据分布不一致的序列(sin 函数本身的性质)
我们对位置向量再提出一个要求,不同的位置向量是可以通过线性转换得到的。这样,我们不仅能表示一个 token 的绝对位置,还可以表示一个 token 的相对位置,即我们想要:
PEt+Δt=TΔt×PEt
其中,T 表示一个线性变换矩阵,如果将 t 想象成角度,则式子可进一步写成:
(sin(t+Δt)cos(t+Δt))=(cosΔt−sinΔtsinΔtcosΔt)(sintcost)
因此可以把原来元素全都是 sin 函数的 PEt 做一个替换,分别用 sin 和 cos 的函数对来表示它们:
PEt=[sin(w0t),cos(w0t),sin(w1t)...,sin(w2dmodel−1)t]
在这样的表示下,我们可以很容易用一个线性变换,把 PEt 转换为 PEt+Δt:PEt+Δt=TΔt∗PEt
- t 是这个 token 在序列中的实际位置
- PEt 是第 t 个 token 的位置向量,PEt(i) 表示这个位置向量里的第 i 个元素
- dmodel 是这个 token 的维度(论文为 512)
PEti={sin(wkt), if i=2kcos(wkt), if i=2k+1
其中:wk=100002k/dmodel1 , i=0,1,2,...,2dmodel−1
该编码方式的性质:
- 两个位置编码的点积仅取决于偏移量 Δt,也即两个位置编码的点积可以反应出两个位置编码间的距离PEtT∗PEt+Δt=∑i=02dmodel−1cos(wiΔt)
- 位置编码的点积是无向的,即 PEtT∗PEt+Δt=PEtT∗PEt−Δt
当位置编码随着 input 被喂进 attention 层时,采用的映射为:PEtTWQTWKPEt+k